Quels sont les moteurs à courant continu qui peuvent être utilisés comme servomoteurs ?
Les servomoteurs sont utilisés dans des applications qui nécessitent un contrôle précis de la position, de la vitesse ou du couple. Mais de nombreux types de moteurs différents peuvent être considérés comme des servomoteurs, et la caractéristique principale d'un servomoteur est qu'il utilise ou lit le retour d'information dans un système en boucle fermée. En fait, bien que de nombreuses applications d'asservissement utilisent des moteurs synchrones à courant alternatif, les moteurs à courant continu peuvent également être utilisés dans les systèmes d'asservissement.
Les moteurs synchrones à courant alternatif sont généralement sans balais (à l'exception des moteurs à usage général, qui sont commutés mécaniquement par des balais et peuvent fonctionner en courant alternatif ou continu). De même, les moteurs à courant continu utilisés dans les systèmes asservis sont le plus souvent sans balais (souvent appelés moteurs BLDC).
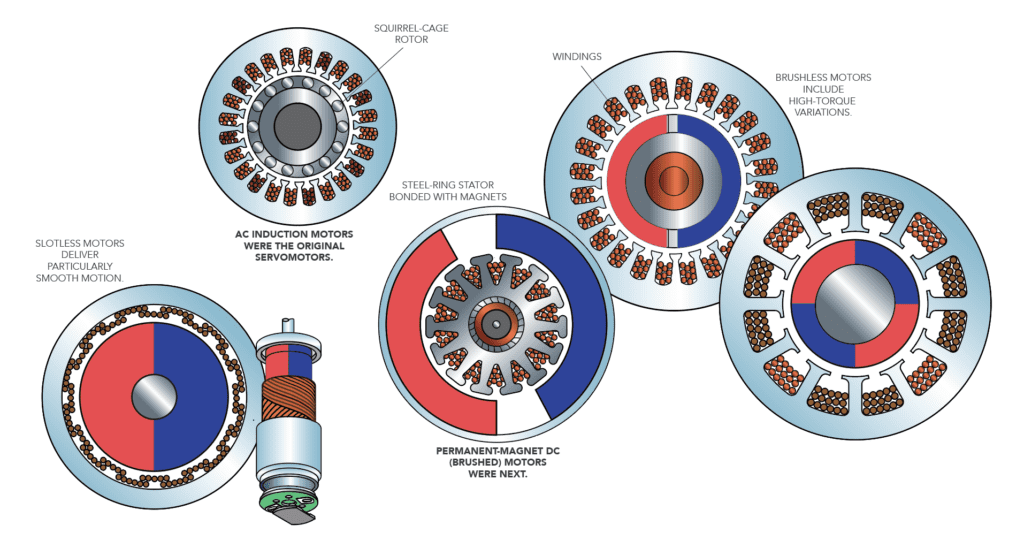
Il convient de noter que les moteurs à courant continu avec balais sont capables de fonctionner dans des systèmes asservis, mais l'usure et l'entretien qu'ils nécessitent en raison des balais et des collecteurs mécaniques les rendent moins adaptés à la plupart des applications asservies. Cet article explique quand il est avantageux d'utiliser un moteur à courant continu à balais dans un système asservi, et en particulier quel type de moteur à courant continu à balais convient le mieux aux applications asservies.
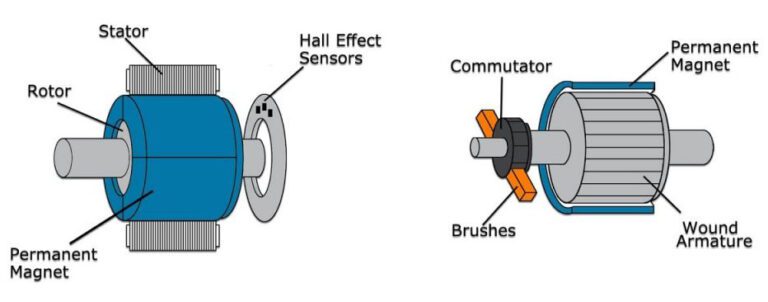
Les moteurs à courant continu sans balais (à gauche) offrent une inertie du rotor plus faible, un rendement plus élevé et moins de maintenance que les moteurs à courant continu à balais (à droite), car la commutation est effectuée électroniquement plutôt que mécaniquement.
Rappelons que les moteurs à courant continu sans balais utilisent des aimants permanents sur le rotor et des bobines sur le stator pour produire une rotation (et un couple). Cette configuration est similaire à celle d'un moteur CA synchrone, mais la principale différence entre un moteur BLDC et un moteur CA synchrone est la façon dont les bobines du stator sont enroulées. Dans un moteur à courant alternatif synchrone, les bobines sont enroulées de manière sinusoïdale et la commutation est une forme d'onde sinusoïdale continue. Cela confère au moteur synchrone à courant alternatif des performances très souples. En revanche, les moteurs BLDC ont des bobines de stator à enroulement trapézoïdal et la commutation se fait en six étapes (tous les 60 degrés), ce qui peut entraîner des fluctuations de couple.
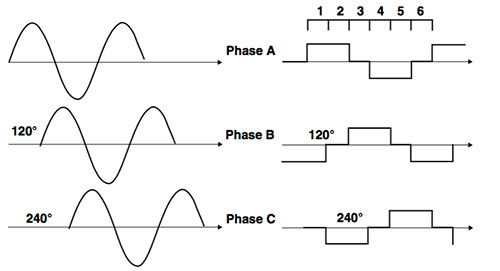
Formes d'ondes sinusoïdales (à gauche) et trapézoïdales (à droite) du courant pour les moteurs synchrones à courant alternatif et les moteurs BLDC, respectivement.
Modifications structurelles du moteur BLDC
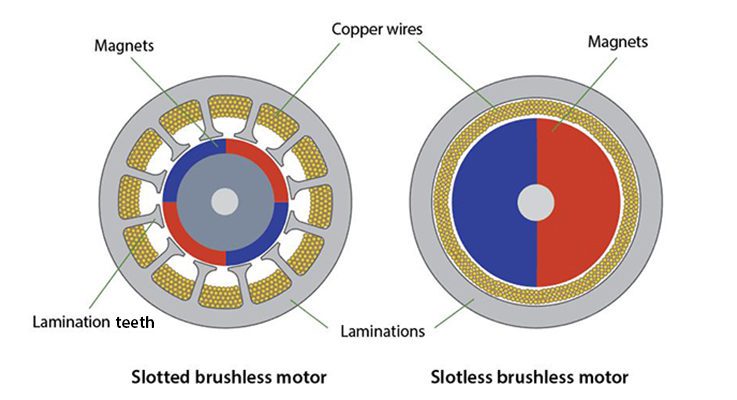
Les moteurs BLDC sont généralement construits avec un stator constitué d'un empilement d'acier à fentes avec des enroulements en cuivre insérés dans les fentes. La conception à fentes peut consister en un rotor au centre du moteur et un stator entourant le rotor (parfois appelé« rotor interne » ou conception à rotor interne). Cela permet de réduire l'inertie du moteur et d'obtenir des performances très dynamiques.
Il est également possible de construire des moteurs à courant continu sans balais à encoches avec un stator à encoches au centre du moteur et des aimants de rotor entourant le stator (parfois appelé « rotor extérieur » ou conception de rotor externe). Cela permet au moteur de produire un couple élevé et d'être construit avec une longueur totale réduite (conception dite « plate »), mais aux dépens d'une dynamique réduite en raison de l'inertie accrue du rotor.
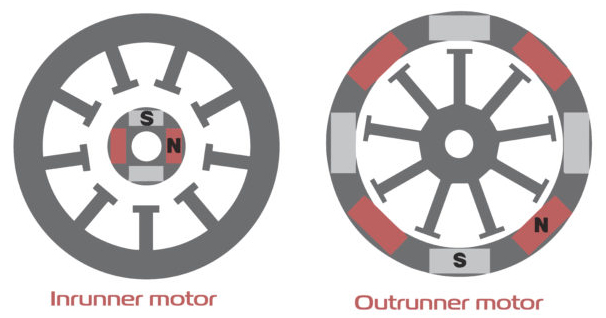
Les moteurs à encoches sont disponibles en version interne (rotor intérieur) ou externe (rotor extérieur).
Quelle que soit la configuration du rotor, interne ou externe, les moteurs BLDC à encoches souffrent d'un couple de cogging car les aimants permanents du rotor tentent de s'aligner sur les encoches du stator. Le principal effet du couple de cogging est qu'il fait tourner le moteur de manière erratique, en particulier à faible vitesse.
Le dernier modèle de moteur BLDC est le modèle sans fente. Cette conception élimine la pile d'acier fendue et utilise à la place un stator composé d'anneaux d'acier empilés les uns sur les autres avec les enroulements encapsulés dans de l'époxy. Les enroulements sont placés dans l'entrefer entre le stator et le rotor (situé au centre du moteur). Les moteurs sans encoches éliminent le couple de cogging, réduisent le bruit audible et diminuent l'inductance, ce qui améliore l'accélération et la réponse dynamique par rapport aux moteurs à encoches.
Les moteurs BLDC sont généralement utilisés dans les applications d'asservissement qui nécessitent un rendement élevé, une grande fiabilité et une bonne densité de couple (production de couple pour une taille donnée), mais pas autant de couple qu'un gros moteur synchrone à courant alternatif. Les servomoteurs BLDC sont couramment utilisés pour les articulations robotiques, les équipements médicaux et les équipements d'emballage. Les moteurs BLDC sont également bien adaptés aux équipements alimentés par batterie et aux applications qui nécessitent l'intégration directe du moteur dans la conception mécanique.