Introduction aux moteurs pas à pas, aux moteurs à courant continu et aux commandes de moteur
Introduction: Un moteur est un dispositif électrique qui convertit l'énergie électrique en mouvement mécanique en faisant tourner un rotor autour d'un axe fixe. Ces moteurs sont polyvalents et peuvent être utilisés dans de nombreuses applications, notamment les caméras de sécurité, les serrures de porte intelligentes et les imprimantes 3D. Pour les ingénieurs comme pour les amateurs, il est important de comprendre les différences entre les différents moteurs, car ces différences n'affectent pas seulement l'application finale, mais déterminent également le choix du pilote de moteur. Dans cet article, nous présenterons deux types de moteurs courants et leurs pilotes respectifs : les moteurs pas à pas et les moteurs à courant continu. Nous décrirons également les similitudes et les différences entre ces types de moteurs, ainsi que les pilotes de moteurs pas à pas et de moteurs à courant continu qui permettent un contrôle et une optimisation sans faille. Moteurs pas à pas Les moteurs pas à pas convertissent les impulsions électriques en un mouvement mécanique précis. Comme son nom l'indique, un moteur pas à pas tourne progressivement, chaque étape correspondant à un angle de rotation précis (généralement autour de 1,8°). Il définit le nombre de rotations en fonction du nombre d'impulsions électriques qu'il reçoit. Comme chaque rotation suit un angle de rotation précis, le moteur pas à pas est très contrôlable. Les principaux composants d'un moteur pas à pas sont les suivants:
1. Le rotor : le rotor, qui est fixé à l'arbre, est la partie rotative du moteur pas à pas. Le rotor possède des dents ou des pôles magnétiques qui produisent un mouvement lorsqu'ils interagissent avec le stator.
2. Le stator : le stator est la partie fixe du moteur. Il comporte des bobines qui produisent un champ magnétique ; les différents enroulements des bobines forment des phases différentes.
3. Phases d'enroulement : les moteurs pas à pas peuvent être bipolaires ou unipolaires. Les moteurs pas à pas bipolaires ont deux phases de bobinage et les moteurs pas à pas unipolaires ont quatre phases de bobinage. Chaque phase est associée à un enroulement sur le stator.
4. Impulsions et contrôle : la rotation d'un moteur pas à pas nécessite l'envoi d'une série d'impulsions électriques aux phases du bobinage. La séquence et la synchronisation de ces impulsions déterminent la direction et la distance de chaque pas.
La figure 1 montre une coupe transversale d'un moteur pas à pas.
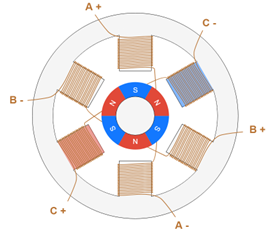
Figure 1 : Moteur pas à pas
Moteurs à courant continu : moteurs à courant continu avec balais et moteurs à courant continu sans balais Les moteurs à courant continu convertissent l'énergie électrique en mouvement mécanique et fonctionnent par induction électromagnétique. Ces moteurs génèrent un champ magnétique entre les parties tournantes et stationnaires ; le champ magnétique pousse le rotor, qui à son tour fait tourner le moteur. Il existe deux principaux types de moteurs à courant continu : les moteurs à courant continu à balais et les moteurs à courant continu sans balais (BLDC). La figure 2 illustre un moteur à courant continu à balais, dont les principaux composants sont décrits ci-dessous :
1. Le rotor : le rotor (ou l'induit) est une bobine enroulée autour d'un noyau de fer. Comme le rotor d'un moteur pas à pas, il constitue la partie tournante d'un moteur à courant continu à balais et est relié au stator.
2. Stator : le stator est une partie fixe constituée d'un (ou de plusieurs) aimant(s) permanent(s) ou électro-aimant(s). Le champ magnétique généré par le stator interagit avec le champ magnétique du rotor pour générer un couple et faire tourner le rotor.
3. Commutateur : le commutateur est un anneau monté sur l'arbre du rotor qui est relié électriquement aux enroulements du rotor. Le collecteur inverse le sens du courant dans les enroulements du rotor et entraîne le moteur.
4. Balais : les balais sont des modules fixes en carbone ou en graphite qui sont utilisés pour entrer en contact de manière dynamique avec le collecteur. Ils conduisent le courant et font ainsi tourner le moteur.
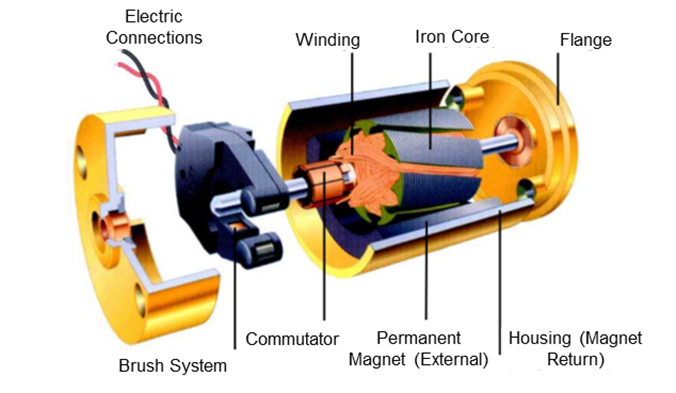
Figure 2 : Moteur à courant continu à balais
La figure 3 montre un moteur BLDC.Les moteurs BLDC n'ont pas de balais, ce qui les rend plus fiables, plus durables et moins sujets à l'usure.Les moteurs BLDC ont un stator avec des bobines multiples et un rotor avec des aimants permanents ou des électro-aimants. Ils sont commutés électroniquement et utilisent un contrôleur pour réguler le courant dans les enroulements du stator.
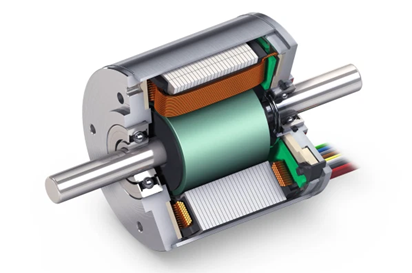
Figure 3 : Moteur BLDC
Pour les moteurs à courant continu, le courant appliqué produit un couple et les applications suggérées comprennent les disques durs d'ordinateurs, les jouets et les systèmes de suivi solaire.
Comparaison des moteurs pas à pas et des moteurs à courant continu
Les moteurs pas à pas, les moteurs à courant continu à balais et les moteurs BLDC sont des types de moteurs différents, chacun ayant ses propres avantages et inconvénients et convenant à des applications différentes. Nous décrivons ci-dessous quelques-unes des principales différences.
Capacités de fonctionnement/contrôle
Les moteurs pas à pas peuvent fonctionner dans un système en boucle ouverte, ce qui signifie que la position exacte du moteur est déterminée par le nombre exact de pas ou d'impulsions envoyés au moteur. Comme un moteur pas à pas fonctionne par étapes discrètes et facilement quantifiables, il n'a pas besoin de contrôle de position. Cependant, il nécessite un dispositif externe pour ajuster la vitesse et la direction du moteur, tel qu'un microcontrôleur (MCU).
Les moteurs à courant continu à balais sont alimentés par une source de courant continu, qui est reliée au rotor par des balais de carbone. Les moteurs CC à balais simples peuvent être contrôlés par un système en boucle ouverte, mais les moteurs plus avancés peuvent nécessiter un mécanisme de rétroaction. Souvent, ces moteurs peuvent être facilement régulés sans nécessiter de contrôleur externe. Par exemple, le réglage de la tension du moteur peut modifier sa vitesse.
Les moteurs BLDC doivent fonctionner dans un système en boucle fermée. Les systèmes en boucle fermée sont plus précis mais nécessitent des circuits de contrôle supplémentaires pour un fonctionnement sans heurts.
Durée de vie
Les moteurs pas à pas sont plus fiables en raison de leur simplicité. Ils peuvent durer jusqu'à 4 ou 5 ans, soit environ 10 000 heures.
Les moteurs à courant continu sont également relativement fiables, mais les moteurs à balais à courant continu nécessitent un entretien constant pour éviter la défaillance des balais. La maintenance est généralement nécessaire après quelques milliers d'heures de fonctionnement.
Les moteurs à courant continu sans balais durent plus longtemps que les moteurs à courant continu à balais, car ils n'ont pas l'usure mécanique associée aux balais et peuvent fonctionner pendant plus de 10 000 heures.
Efficacité et bruit
Les moteurs pas à pas ont tendance à être moins efficaces parce qu'ils perdent de l'énergie par dissipation thermique ; en outre, les moteurs pas à pas fonctionnent toujours à l'intensité maximale et consomment donc beaucoup d'énergie. Les moteurs à courant continu sont plus efficaces, les moteurs à courant continu sans balais étant les plus efficaces car ils ne perdent pas beaucoup d'énergie à cause du frottement des balais.
En termes de bruit, les moteurs pas à pas sont dans la pire situation, car leur fonctionnement pas à pas produit un bruit de vrombissement ou de cliquetis lorsque le moteur tourne à une vitesse continue. Les moteurs à courant continu avec balais sont moins bruyants, mais ils produisent tout de même un bruit lorsque les balais frottent sur le collecteur ; les moteurs BLDC sont probablement les moins bruyants.
En résumé
Moteurs pas à pas
Avantages:
- Haute précision
- Grande exactitude
- Facile à contrôler
- Longue durée de vie (10 000 heures)
Inconvénients:
- Efficacité moindre
- Nécessite un contrôle externe (microcontrôleur)
- Bruyant
Applications:
- Imprimantes 3D
- Télescopes
- Lecteurs de disques
- Robotique
Moteurs CC à balais
Avantages:
- Rendement moyen
- Temps de réponse plus rapide
- Peut détecter les surcharges
Inconvénients:
- Durée de vie plus courte ; entretien nécessaire pour garantir la fiabilité
- Compliqué à contrôler
Applications:
- Outils/appareils électriques
- Automobile (par exemple, essuie-glaces)
- Jouets
- Ventilateurs
Avantages:
- Rendement élevé
- Nécessite peu d'entretien
- Silencieux
- Durée de vie extrêmement longue (plus de 10 000 heures)
Inconvénients:
- Commandes compliquées
- Sensible aux températures extrêmes
Applications:
- Véhicules électriques
- Appareils ménagers
- Équipement médical (par exemple, pompes à perfusion, imageurs)